6163银河.net163.am


通常我们打开机器人选型手册时,会看到机器人的规格参数表、尺寸图、安装和法兰尺寸图、工作空间等。工业机器人的参数有很多,譬如最大负载、最大速度、工作空间、工作半径等等。接下来介绍一下工业机器人正确选型步骤:
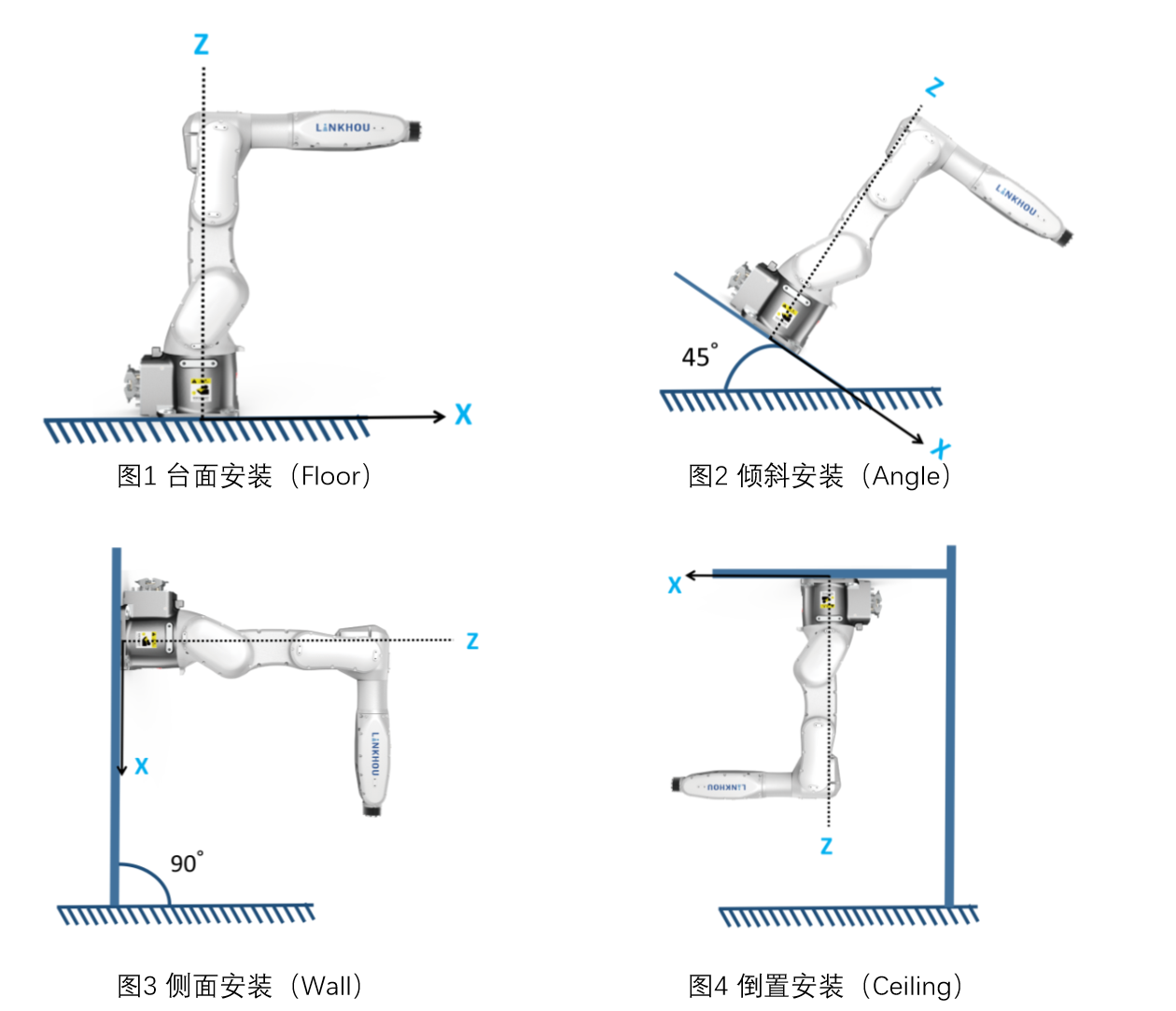
如果受空间限制机器人需要倒置或者斜面安装,那么在选型时就要考虑机器人是否支持。一般的SCARA机器人只支持台面安装,而很多六轴机器人都支持多种安装方式。

步骤三:负载(Payload)
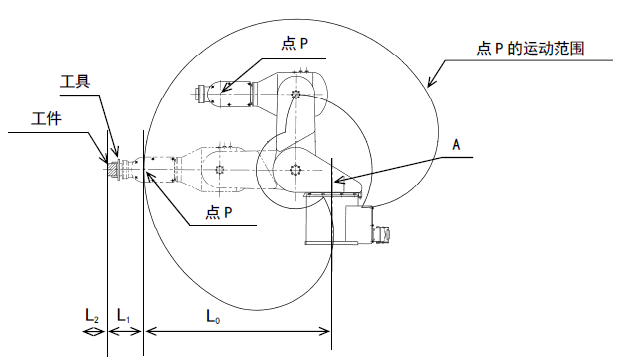
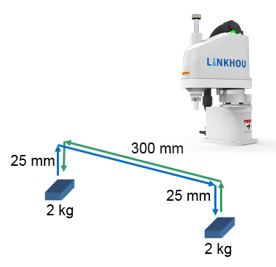
参考国标工业机器人词汇(GB/T 12643),定义末端最大负载为机器人在工作范围内的任何位姿上所能承受的最大质量。为了充分发挥机器人自身具备的性能,选型时要尽量把负载(夹具末端重量+工件重量)与负载的装载惯性控制在额定值以内。
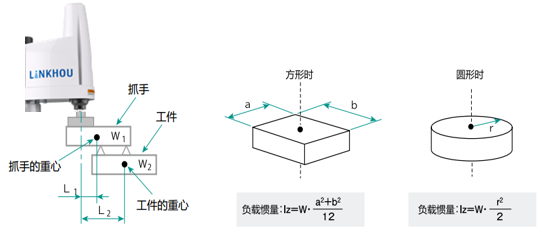
夹具质量 : W1(kg)最后,请确认该值M是否符合该机型的负载力矩范围内。
夹具重心位置: L1(m)
工件质量 : W2(kg)
工件重心位置: L2(m)
重力加速度 : g(m/sec²)
施加于J5轴的负载力矩如下:
J5轴负载力矩(N·m):M=W1×L1×g+W2×L2×g
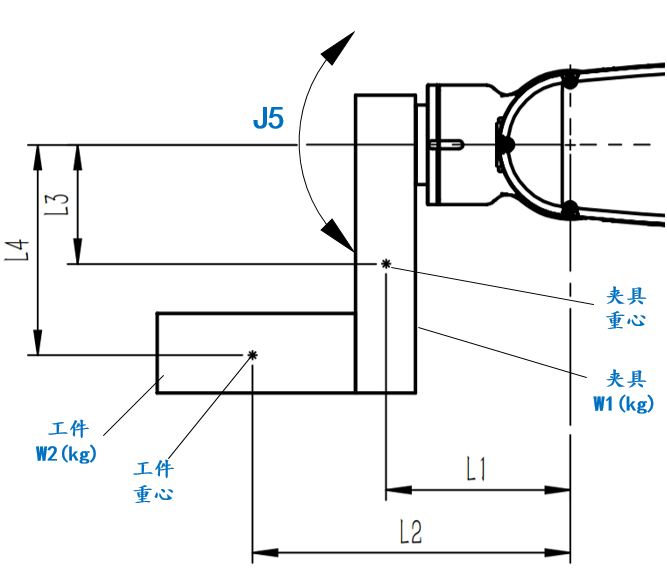
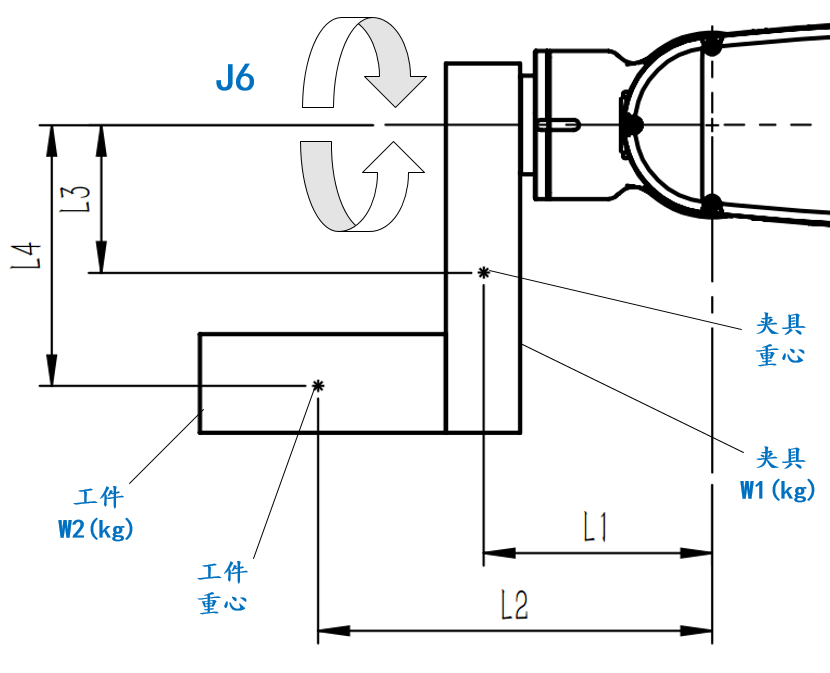
夹具质量 : W1(kg)最后,请确认该值M是否符合该机型的负载力矩范围内。
夹具重心位置: L3(m)
工件质量 : W2(kg)
工件重心位置: L4(m)
重力加速度 : g(m/sec²)
施加于J6轴的负载力矩如下:
J6轴负载力矩(N·m):M=W1×L3×g+W2×L4×g
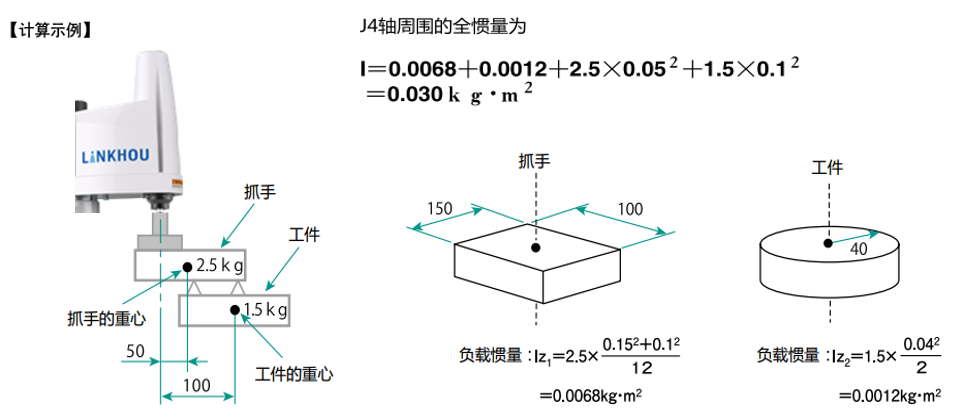
当机器人在运转过程中,需要J4轴姿态变动时,还需要对J4轴附件的负载惯量进行校核确认。
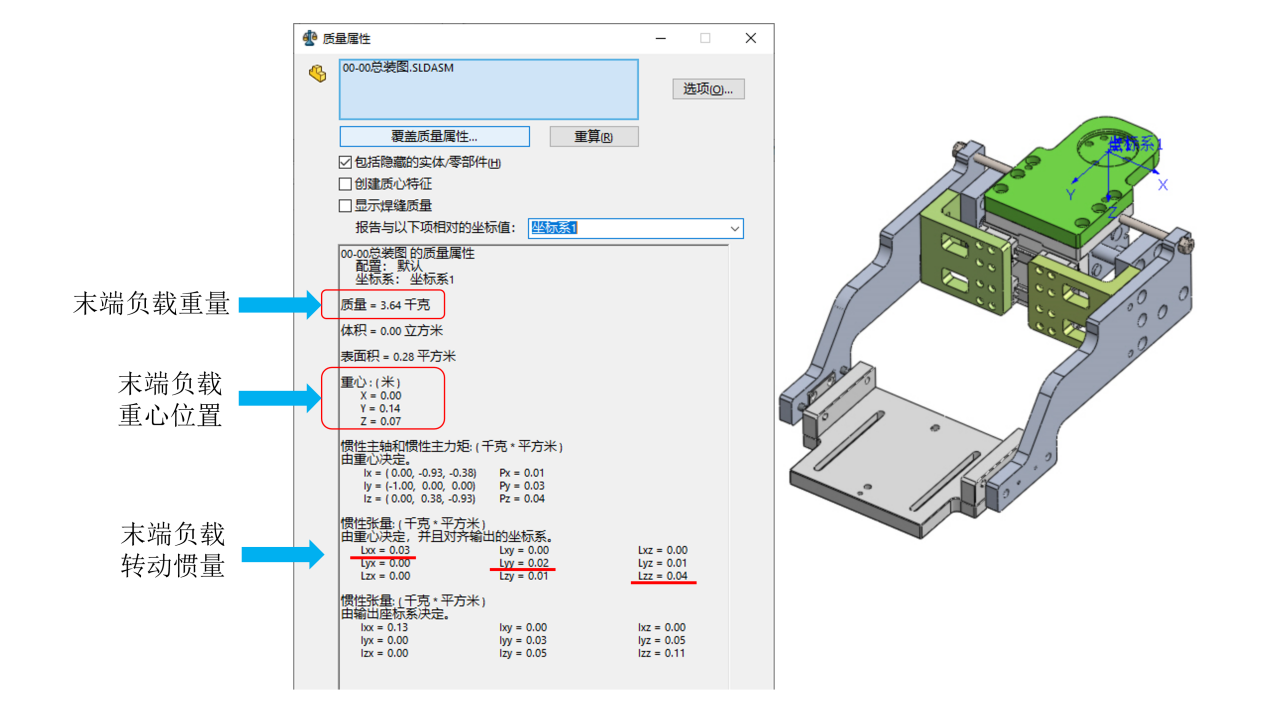
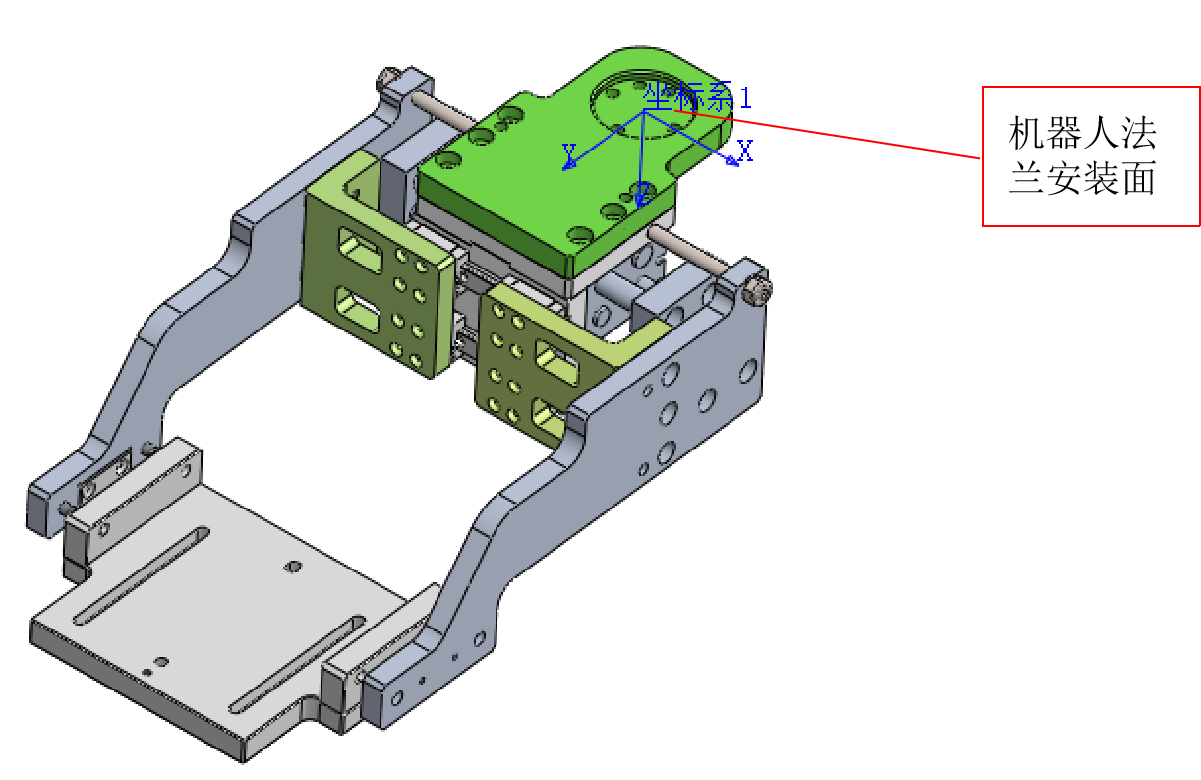
图12 机器人安装面中心点建立坐标系
6163银河.net163.am负载校核软件分析:
综合以上两种方式:方式一计算过程繁琐,耗时长;方式二相对简单,易于实用(优先推荐)。

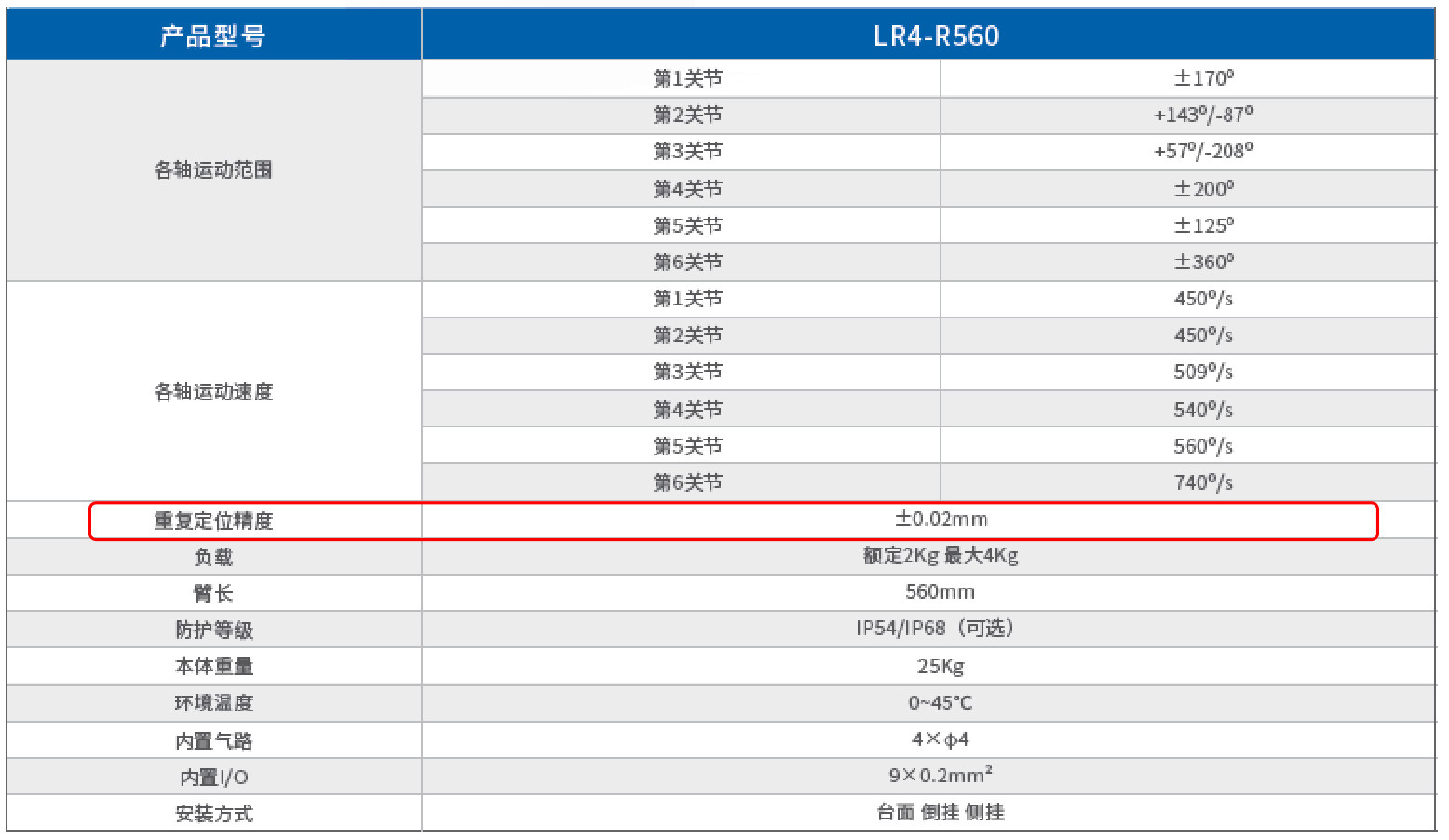
一般在机器人选型目录里面都会提供每款型号的重复定位精度。
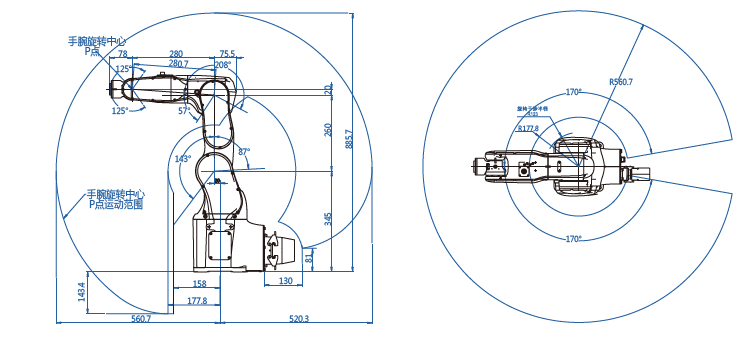
下面以6163银河.net163.amLR4-R560举例:
3)根据使用经验估算。
机器人使用的环境也很重要,机器人工作的环境温度一般在0-40˚。机器人如果在东北的冬天可能就无法正常工作,需要增加空调,穿上保暖服等措施来保证机器人运行。相反在一些高温的环境,机器人需要降温处理。降温可以通过施加压缩空气,穿隔热服等措施。同样也要考虑湿度的影响,湿度大或者沿海地区使用可能导致机器人腐蚀进而影响机器人的正常使用。


机器人和外围设备的通信方式:IO、TCP/IP、Modbus TCP、Modbus RTU、EIP、串口通信等。如果采用I/O交互,不仅需考虑IO的数量(包含系统I/O和用户I/O),还要考虑IO的类型,是NPN还是PNP?
机器人工作的气压:0.5Mpa-0.7Mpa。

联系电话:(86)512-66593362
传真:(86)512-66593372
电话号码:0512-66593362
市场邮箱:linkhou.marketing@linkhou.com
采购邮箱:caobin@linkhou.com
地址:苏州市吴江区江陵街道泉德路699号2幢

 联系我们
联系我们 官方微信
官方微信 QQ客服
QQ客服 新浪微博
新浪微博